Swift es un dron piloteado por inteligencia artificial que ha vencido pilotos humanos campeones de la Dron Racing League, incluido el campeón del mundo. Así se construyó este dispositivo que supera obstáculos y realiza recorridos más rápido que uno pilotado por un humano profesional.
La revista Nature detalla cómo investigadores de la Universidad de Zúrich y los Laboratorios Intel, construyeron Swift. Este dron utiliza una combinación de algoritmos tradicionales y basados en el aprendizaje para mapear lecturas sensoriales integradas para controlar comandos.
El mapeo consta de una política de observación, que destila información visual e inercial de alta dimensión en una codificación de baja dimensión específica de la tarea, y una política de control que transforma la codificación en comandos para el dron.
El vehículo utiliza una combinación de algoritmos y un sistema de percepción que analiza el entorno y asigna comandos de control. Por medio de aprendizaje de refuerzo profundo, los científicos consiguieron que el dron venciera a tres campeones de diversas categorías en una pista con varios obstáculos.
Te puede interesar: China desarrolla drones que permanecen en el aire por tiempos prolongados y sin baterías
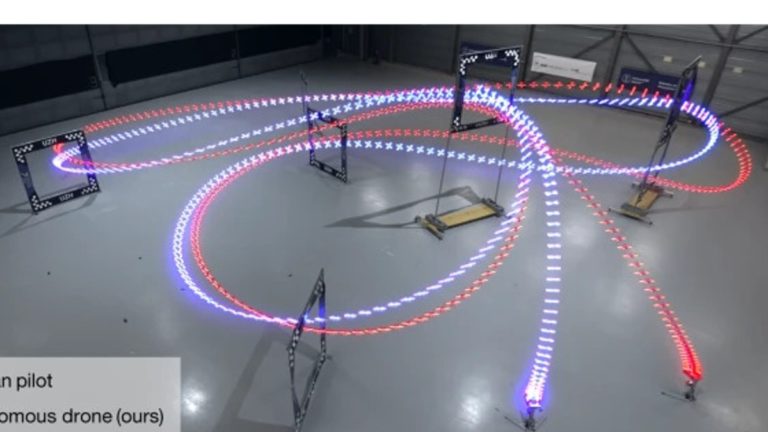
Estas carreras de drones FPV (con cámara inmersiva) se llevan a cabo en una pista diseñada por un piloto externo de clase mundial. La pista presenta maniobras características y desafiantes, como un Split-S. Los pilotos pueden continuar compitiendo incluso después de un accidente. Si dos drones chocan y no pueden completar la pista, gana el dron que avanzó más.
En el desafío, Swift ganó 5 de 9 carreras contra A. Vanover, 4 de 7 carreras contra T. Bitmatta y 6 de 9 carreras contra M. Schaepper; todos pilotos humanos de élite. De las 10 pérdidas registradas, el 40% se debió a una colisión con el oponente, el 40% a una colisión con una puerta y el 20% a que el dron era más lento que el piloto humano.
Swift también logró el mejor tiempo registrado en carrera, con una ventaja de medio segundo sobre el mejor tiempo registrado por un piloto humano.
La competencia de drones FPV es un deporte televisado en el que competidores profesionales pilotean aviones de alta velocidad a través de un circuito en 3D. Cada piloto ve el entorno desde la perspectiva de su dron mediante vídeo transmitido desde una cámara a bordo. Alcanzar el nivel de pilotos profesionales con un dron autónomo es un reto porque el robot necesita volar al límite físico estimando su velocidad y ubicación.
Te puede interesar: Respaldo de EE.UU. al uso de robots asesinos, ¿acelera una guerra de drones?
De acuerdo con investigadores del Grupo de Robótica y Percepción de la Universidad de Zúrich, Swift se vale de un sensor inercial, una cámara y un ordenador a bordo. El dron utiliza odometría visual inercial (VIO) para estimar su posición, velocidad y orientación. Con la ayuda de la cámara y un algoritmo PNP, triangula la ubicación de las puertas por las que debe pasar durante cada vuelta.
Dentro de el simulador utilizado, los investigadores ejecutan una secuencia con 100 agentes en paralelo para encontrar el camino más rápido en la pista. El simulador se ejecuta en un ordenador con procesador Core i9-12900K, 32 GB de RAM y una GPU GeForce RTX 3090. Según el estudio, a los científicos les tomó 50 minutos antes de descubrir la ruta ideal en el simulador.
Te puede interesar: Inician las pruebas de la autopista de drones sobre el Río Medellín
La única desventaja de Swift es que la cámara tiene una frecuencia de actualización de 30 Hz, mientras que los pilotos humanos usan una a 120 Hz.
“Las posibilidades son infinitas, este es el comienzo de algo que podría cambiar el mundo entero. Por otro lado, soy un corredor, no quiero que nada sea más rápido que yo. Pronto, el dron con IA podría incluso utilizarse como herramienta de entrenamiento para comprender lo que sería posible”, explicó Thomas Bitmatta, uno de los investigadores.
Imagen: Nature