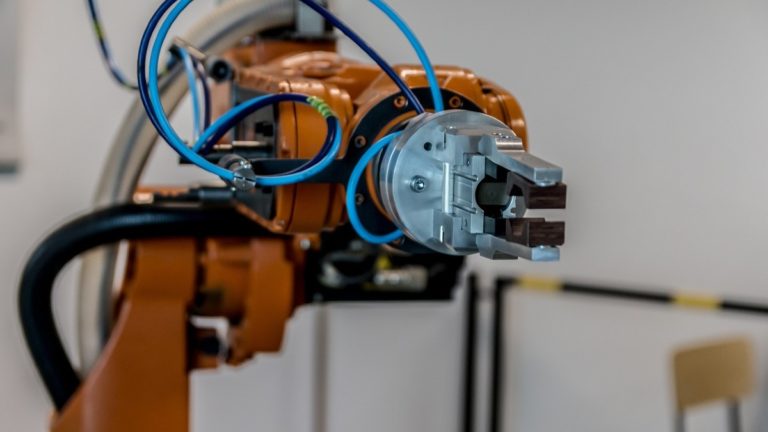
El brazo robótico está siendo desarrollado por estudiantes de ingeniería de la Universidad Nacional de Colombia, con el objetivo de emplearlo en la industria de la manufactura inteligente. El aparato estaría en un espacio físico y en el digital; un software que lo opera remotamente.
El brazo simulador lo desarrolla actualmente un grupo estudiantes de ingeniería mecatrónica de la Universidad Nacional de Colombia (UNAL), sede La Paz (Cesar). El aparato, que imita los movimientos de un brazo humano, fue creado por la plataforma de programación y cálculo numérico de datos y algoritmos MatLab.
El modelo Simulink se podría emplear en la industria de la manufactura inteligente. “Desarrollos como este pueden hacer que los procesos industriales sean más rápidos y eficientes. En la actualidad se habla de la industria de los ‘gemelos inteligentes o digitales’. Cuando el robot físico utilice el laboratorio, empresa o planta de producción, aunque tenga fallas, estas se puedan detectar mediante el dispositivo simulador”, explica el profesor Juan Vaca, investigador en Biotecnología de la institución.
Te puede interesar: Mujer con parálisis volvió a hablar y gesticular gracias a IA y a un avatar
Según el equipo, conformado por Esteban Rodríguez, Andrés Torrijos, en un futuro esta innovación podría ejercer funciones de carga, ya que posee cuatro articulaciones o grados de libertad, falanges y muñeca. También en ensamble y soldadura de industria automotriz, entre otras.
El proyecto está en su etapa inicial y su programación se hizo mediante el software Fusion 360. El funcionamiento del diseño con carga como resistencia para simular movimiento, se hizo mediante la plataforma MatLab.
Te puede interesar: Tras meses de parálisis, una mujer camina sola gracias a pantalón inteligente: Así funciona
“Para lograr que un robot realice una tarea de la manera más precisa se requiere de actuadores, encargados de generar la fuerza para darle movimiento a las piezas mecánicas del manipulador; y los sensores, que permiten medir las características del mundo que rodea al robot. También son indispensables los modelos cinemáticos para evaluar la posición y orientación del extremo”, explica Esteban Rodriguez.
Simulink proporciona una representación visual y detallada de la interacción entre los componentes del brazo robótico, facilitando el análisis e identificación de los posibles problemas o mejoras.
Imágenes: UNAL Sede de La Paz/jarmoluk